设备:
cuav v5+(客服说如果用ardupilot,那么固件选cuav v5,通用)
一,基本资料
ardupilot就是简称apm
ROVER官网地址:https://ardupilot.org/rover/
总官网:https://ardupilot.org/ardupilot/
地面站mission planner官网:https://ardupilot.org/planner/index.html
嵌入式版连接APM的官网:https://ardupilot.org/dev/docs/companion-computers.html
APM固件自定义构建网址:https://custom.ardupilot.org/
apsync嵌入式系统包官网:https://ardupilot.org/dev/docs/apsync-intro.html
apsync下载地址:https://firmware.ardupilot.org/Companion/apsync/beta/
二,配置
1.电机配置
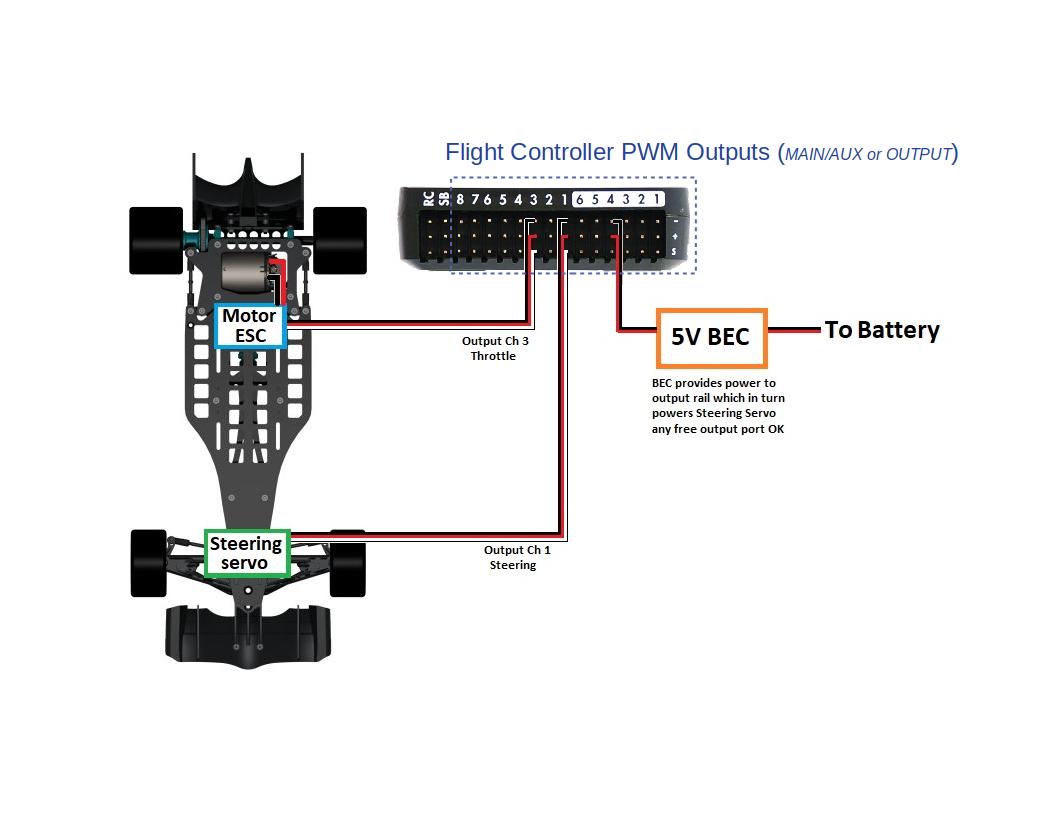
默认设置为:
- 输出 3 = 油门
- 输出 1 = 转向
2,电流计设置
选择电压和电流,传感器是cuav hv pm,版本选cuav v5

3,指南针校准
rover官方指南针校准链接:https://ardupilot.org/rover/docs/common-compass-calibration-in-mission-planner.html
高级指南针校准:https://ardupilot.org/rover/docs/common-compass-setup-advanced.html#common-compass-setup-advanced
ArduPilot 允许连接多个指南针,但一次只能使用三个。通常,只使用主罗盘,除非其读数与其他罗盘和/或其他传感器存在一致性问题。在这种情况下,自动驾驶仪将自动确定使用前三个罗盘中的哪一个。
有外部指南针,优先用外部指南针,因为外部干扰小。
如果您经常看到“不一致的罗盘”预装消息,并且您确定外部罗盘已校准,则应该禁用任何内部罗盘。
如果你采用了外部GPS(比如笔者采用了CUAV NEO 2 GPS),则内部罗盘和外部罗盘选择一个即可。推荐采用内部罗盘,当然选用外部也可以,但是在放置GPS时注意避开大电流设备(数传、接收机等),避免干扰。系统会自动识别你是否有外部罗盘,外部罗盘在上方“Compass Priority”的“Extern”上会打勾。右侧的UP和DOWN可以调整罗盘的优先级。或者在“Compass Priority”下方你可以指定选择使用哪个罗盘。选择后点“Reboot”重启飞控以应用操作。
随后进行校准。
注意:校准前,GPS箭头方向和飞控箭头方向最好保持一致,如果可以的话用扎带或者绳子将二者固定在一起。
点击“Start”,蜂鸣器会发出短-长的蜂鸣,然后转为稳定的短蜂鸣。此时拿起飞控和罗盘转着画8字(像使用手机地图时提示校准罗盘那样,目的是使得罗盘在三个轴上都有旋转)。当右侧信息框打印“MAG_CAL_SUCCESS”时,校准完成,重启飞控。校准失败,则重复上述操作
本文地址: ardupilot rover的mission planner配置